Atacama
Pathfinder
EXperiment
APEX-IFD-MPI0002
Revision: 1.2
April 10, 2003
Interface
Description
Jennifer Hatchell
Multi-Beam FITS Raw Data
Format
Interface Description
Jennifer Hatchell and Dirk Muders
hatchell, dmuders@mpifr-bonn.mpg.de
The MBFITS working group:
Robert Lucas lucas@iram.fr
Helmut Wiesemeyer wiesemey@iram.fr
Albrecht Sievers sievers@iram.es
Frederic Gueth gueth@iram.fr
Dirk Muders dmuders@mpifr-bonn.mpg.de
Keywords: Data Format, FITS, APEX
Author Signature: Jennifer Hatchell
Date: April 10, 2003
Approved by: NN
Signature:
Institute: MPIfR
Date:
Released by:
Signature:
Institute:
Date:
�APEX
Multi-Beam FITS Raw Data Format
Contents
1 Introduction
1.1
MBFITS and ALMA-TI FITS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2
Scans, observations and integrations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
5
5
2 What’s new in v.1.2?
7
3 Explanatory notes
3.1
Scanning/mapping description . . . . . . . . . . . . . . . . . . . . . .
3.2
Phase description for switched observations. . . . . . . . . . . . . . .
3.3
Calibration parameters . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1
Continuum calibration . . . . . . . . . . . . . . . . . . . . .
3.3.2
Spectral line calibration . . . . . . . . . . . . . . . . . . . .
3.4
DATE-OBS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5
WCS coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.1
Sources of spatial coordinate information . . . . . . . . . . .
3.5.2
WCS representation and telescope control system input . . .
3.5.3
WCS coordinate systems . . . . . . . . . . . . . . . . . . .
3.5.4
30m parameters . . . . . . . . . . . . . . . . . . . . . . . .
3.5.5
WCS parameters (including derivation from 30m parameters)
3.5.6
Moving bodies . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.7
Observations in Az/El, On-the-fly mapping in Az/El . . . . .
3.5.8
Pointing . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.9
WCS spectral coordinates . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 References
9
9
10
11
11
12
13
13
13
14
15
16
16
19
19
20
21
21
5 MBFITS specification
5.0.10
Data types . . . . . . . . . . . . . . . . . . . . . .
5.1
The Primary header . . . . . . . . . . . . . . . . . . . . . .
5.2
The SCAN-MBFITS Binary Table . . . . . . . . . . . . . . . .
5.2.1
SCAN-MBFITS Binary Table Header Keywords . . .
5.2.2
SCAN-MBFITS Binary Table Columns . . . . . . .
5.3
The FEBEPAR-MBFITS Binary Table . . . . . . . . . . . . . .
5.3.1
FEBEPAR-MBFITS Binary Table Header Keywords .
5.3.2
FEBEPAR-MBFITS Binary Table Columns . . . . .
5.4
The ARRAYDATA-MBFITS Binary Table . . . . . . . . . . . .
5.4.1
ARRAYDATA-MBFITS Binary Table Header Keywords
5.4.2
ARRAYDATA-MBFITS Binary Table Columns . . . . .
5.5
The MONITOR-MBFITS Binary Table . . . . . . . . . . . . . .
5.5.1
MONITOR-MBFITS Table Header Keywords . . . . .
5.5.2
MONITOR-MBFITS Binary Table Columns . . . . . .
5.5.3
Anticipated monitor points . . . . . . . . . . . . .
5.6
The DATAPAR-MBFITS Binary Table . . . . . . . . . . . . . .
5.6.1
DATAPAR-MBFITS Binary Table Header Keywords .
5.6.2
DATAPAR-MBFITS Binary Table Columns . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Create Date: April 10, 2003
Contact author: Jennifer Hatchell
Page 2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
22
22
22
23
23
26
27
27
28
30
30
31
32
33
33
33
36
36
37
�APEX
Multi-Beam FITS Raw Data Format
Abstract
This document describes a FITS raw data format for multibeam multireceiver/backend single dish
telescopes. It is intended for use at the IRAM 30-m and APEX.
Create Date: April 10, 2003
Page 3
Contact author: Jennifer Hatchell
�Multi-Beam FITS Raw Data Format
APEX
Observ i ng
setup
ARRAYDATA
MB FITS bl ock di agram v.1.2
FEBE
FEBE 1 FEBE 2
PRIMARY HEADER
SCAN
MONITOR
head er
table
DATAPAR
FEBE 1 FEBE 2
head er
table rows
per
integration
ARRAYDATA
and DATAPAR
entries are matched
by INTEGNUM
and MJD
Contact author: Jennifer Hatchell
Page 4
Create Date: April 10, 2003
Data associated
...
FEBE 1 FEBE 2
...
parameters
DATAPAR table
2 basebands
FEBE 2
...
R aw moni tor data
MONITOR table
3 basebands
FEBE 1
R aw backend data
2 basebands
FEBE 2
...
Header
...
3 basebands
FEBE 1
...
1
...
2
ARRAYDATA table
File
Scan
Ob servation
Integrations
(for each observation)
Figure 1: MBFITS file structure
�APEX
1
Multi-Beam FITS Raw Data Format
Introduction
1.1
MBFITS and ALMA-TI FITS
The MBFITS working group was created at the array receiver meeting at IRAM Grenoble in December
2001. The goal was to define a new raw data format for multibeam receivers based on FITS to be used at
the IRAM 30m and APEX telescopes. With a common raw data format it is much easier to share software
developments in the areas of data calibration (chopper wheel, atmospheric, etc.) and data reduction. The
resulting MBFITS format can be used for all single-dish bolometer and heterodyne observations including
multiple frontend/backend combinations and array receivers.
The MBFITS format was derived structurally from the ALMA-TI FITS raw data format, although a
number of changes had to be made to accomodate the special needs of the IRAM and APEX telescopes.
We would like to thank especially Robert Lucas, who is one of the authors of the ALMA-TI format, for
his valuable contributions to our discussions.
The MBFITS format is based on the scan-observation-integration scheme used by ALMA-TI FITS
and retains many of its keywords. However, due to the changes in structure and additional keywords
needed to accommodate single-dish configurations, particularly multiple beam observing and multiple
frontend/backend combinations, the MBFITS format can now be considered to be an independent format.
In Sect. 2 we outline the updates in the latest version of MBFITS. In Sect. 3, various aspects of
MBFITS are described in detail. Then follows the specification of the FITS tables (Sect. 5. Finally, we
include references (Sect.4).
1.2
Scans, observations and integrations
Extracted from the ALMA Software Glossary (via ALMA-TI FITS definition, Lucas & Glendenning 2001):
dump The smallest interval of time for which a set of correlated data can be accumulated and
output from the correlator.
integration A set of dumps, all identical in configuration (except for the antenna motion and
some others), that is accumulated and forms the basic recorded unit.
observation A set of integrations while the antennas complete an elemental pattern across
the source, possibly while frequency switching, nutator switching, etc.
scan A set of observations with a common goal, for example, a pointing scan, a focus scan, or
an atmospheric amplitude calibration scan, or a correlation scan on a continuum source
or a line source.
For instance in the case of holography measurements an observation would be a drift across the
transmitter or a bore-sight measurement, while a scan could be the whole set of observations
needed to acquire a beam map. Or a scan could be a pointing scan with two observations
(an azimuth drift and an elevation drift across the pointing calibrator) or an atmospheric
calibration scan with three observations (autocorrelations on the sky, and two loads at different
temperatures, ...).
A scan can be as simple as a short integration on a celestial source while total power and/or
correlator output are recorded; or it could be a set of pointed observations that are used
together to form a map of an extended celestial source.
Here are some examples of how this scheme works for single dish observing.
More examples of a scan:
– An on-the-fly map of an astronomical source, including associated sky off observations
– A raster map . . .
– A pointing scan (cross-raster or cross-OTF
– A focus scan
Create Date: April 10, 2003
Page 5
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
– A skydip
– A flux calibration measurement
– Five on-source measurements forming a cross and a sky off position
– A holography measurement
. . . and an observation:
– A line of an OTF map
– One sample in a raster
– A sample on a sky off position
– A heterodyne calibration (HOT/COLD/SKY)
– One step in a focus scan
Create Date: April 10, 2003
Page 6
Contact author: Jennifer Hatchell
�APEX
2
Multi-Beam FITS Raw Data Format
What’s new in v.1.2?
Keywords which are new, moved or altered in v.1.2 are given in bold in the tables.
1. The INTMON tables have been merged into DATAPAR.
There is now only one additional table, DATAPAR, associated with each ARRAYDATA data table.
What previously were INTMON and DATAPAR have been combined. Originally, the two were
separated because the information in DATAPAR can be written directly at the time of an integration,
whereas the INTMON values are interpolated/calculated from information in MONITOR which is
not available until the end of an observation. By buffering the DATAPAR entries until the end of
the observation, when the MONITOR values are available, all the data-associated parameters can
be written together, saving on duplication in table and header. This change forces the positions etc.
which were previously in INTMON to be written in quasi-real-time rather than filled in later offline,
but it has become clear that this is necessary anyway to maintain an uninterrupted data flow at the
telescope.
2. Variable length arrays in MONITOR
The MONITOR array, which stores real-time data at its natural rate, was limited by its format to
storing single floating-point values. This is hugely restrictive when one wants to store eg. 5 structural
temperatures, a spectral line gain array, or total power measurements for 3 frequency bands. We
have changed MONITOR to store variable length arrays instead of single floating point values.
This would introduce additional overheads if the majority of entries were still single floating point
values. This is not the case as most entries group naturally into small arrays eg. 2 encoder readings,
2 temperatures and 3 powers from a calibration. We store one time, description and units for each
array. Thus by changing to variable length arrays in fact we reduce the storage overheads.
Variable length arrays in FITS are described in [9] Cotton, Tody & Pence 1995 Appendix A. The
IAU FITS group has not yet voted to include this as part of the FITS standard though it is likely
that it eventually will. The North American regional FITS group has accepted it and it is already
in use in many FITS formats. It is supported by many FITS packages including CFITSIO and
FitsView.
The storage works like this: in the fourth column of MONITOR a pointer to the variable length
data array is stored. The data are stored at the end of the table. See [9] for details.
With variable length arrays, almost anything can be stored in MONITOR. This gives MBFITS the
flexibility to cope with future unforeseen requirements without making changes to the existing table
structure.
3. Calibration
A close look has been taken at what’s required in order to calibrate the data and where this should
be stored; see 3.3 below.
4. Scanning/mapping description
Keywords which describe scanning/mapping keywords have been updated following a work-through
of examples. See 3.1.
5. Phase coding
We have looked description of multiphase (switching) observations and describe schemes for some
common cases in 3.2.
6. Data blocking
Data blocking is now possible ie. several rows in the ARRAYDATA table can now be written for
one set of DATAPAR. This is controlled by DPBLOCK (DATAPAR header), a flag set to true if
blocking, and NINTS(DATAPAR table) which stores how many ARRAYDATA entries correspond to
the DATAPAR entry.
Create Date: April 10, 2003
Page 7
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
When blocking, all DATAPAR values refer to the first integration of the block. An integration
for which no direct entry in DATAPAR exists should take ISWITCH from the previous entry and
interpolate between times and angles from bracketing entries. If blocking, a DATAPAR entry should
always be written for the first and last integration of each observation.
7. Holography
The HOLODATA table has been removed. Holography data is now stored as any other data in
ARRAYDATA. If SCANTYPE=HOLO, special holography keywords TRANDIST (transmitter distance),
TRANFREQ (transmitter frequency) and TRANFOCU (transmitter offset from prime focus) are stored in
the SCAN header.
8. Keyword compatibility: dashes and underscores, and SDFITS
Unnecessary dashes and underscores in keywords have been purged. An exception is the unavoidable
FITS keyword DATE-OBS. Underscores are used for clarity in the MONITOR point descriptions: these
are not FITS keywords.
Keyword clashes with SDFITS (Single Dish FITS) have been resolved and a couple of keywords
added:
– OBSID stores the observer’s and operator’s initials (scan header);
– OBS-LONG, OBS-LAT and OBS-ELEV are now SITELONG, SITELAT, SITEELEV (scan header);
– MOLECULE and TRANSITI (optionally) together contain the molecule and transition for the main
spectral line
9. MJD is used more widely than DATE-OBS to mark the integrations. FITS readers such as fitsview
need a numerical (rather than text-format) timestamp to display sequential data. See 3.4 below.
10. Other keyword additions and alterations
Keywords which have been altered (new, name changed, or moved) are marked in bold. Includes:
– FRQTHROW in the FEBE header gives the frequency step for frequency switched observations.
– DEWRTMOD (FEBE) is one of CABIN = dewar rotation fixed in Nasmyth/Cassegrain system, EQUA:
RA/DEC; or HORIZ: AZ/EL. DEWANG (FEBE) is measured counterclockwise (anticlockwise) from
vertical in the DEWRTMOD system in which the dewar rotation is fixed. Therefore DEWANG is also
fixed throughout a scan. The feed offsets FEEDOFFX, FEEDOFFY (FEBE table) are measured in
degrees in the system in which the dewar rotation remains fixed.
Create Date: April 10, 2003
Page 8
Contact author: Jennifer Hatchell
�APEX
3
Multi-Beam FITS Raw Data Format
Explanatory notes
In this section we describe how various aspects of data storage are handled in MBFITS. In particular,
these explanatory notes show where to find the keywords/table columns associated with one theme (eg.
positions, mapping parameters), as these can be scattered across the tables. Explanation of individual
keywords and small keyword groups can be found in the introductions to the individual tables and as
comments in the table descriptions. (sections 5.2–5.6).
3.1
Scanning/mapping description
The movements which the observer intended the telescope to carry out during a scan are stored in the
following scanning parameters, so that the mapping scheme can be envisaged by the recipient of the data/
deduced by the data reduction software.
Note that the scanning parameters are not needed for the data reduction, which requires only the
absolute positions of the current optical axis(LONGOFF, LATOFF) and information on whether an integration
is part of the scan or off-scan (stored in ISWITCH in the DATAPAR table). Thus the scan parameters are
optional. From a quick map of the observed positions, the scan geometry can be reconstructed. The data
reduction software should not calculate positions based on this description but instead rely
on the actual observed positions given in DATAPAR.
At the highest level, SCANTYPE shows the type of astronomical observation: POINT, FOCUS, CAL,
SKYDIP, HOLO, OTF, ONOFF, PSW, RASTER, CROSS, FLUXCAL, etc. Then two parameters define how
the telescope moves during the scan: SCANMODE and SCANGEOM. SCANMODE describes the mapping mode
(SAMPLE, RASTER, OTF) and SCANGEOM the geometry (LINE, CROSS, CIRC, ARC etc.).
Then follow a number of scan keywords (lengths, directions etc.). Which of these are needed depends
on the type of SCANMODE:
SCANMODE
SAMPLE
RASTER
OTF
keywords required
SCANRPTS
SCANLINE, SCAPTS, SCANXSPC, SCANYSPC, SCANLEN,
SCANDIR, ZIGZAG, CROCYCLE
SCANLINE, SCANRPTS, SCANXVEL or SCANTIME, SCANYSPC,
SCANLEN, SCANDIR, ZIGZAG, CROCYCLE
The keywords are:
Create Date: April 10, 2003
Page 9
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
SCANDIR
SCANLINE
SCANRPTS
SCANLEN
SCANXVEL
SCANTIME
SCANXSPC
SCANYSPC
SCANSKEW
SCANPAR1
SCANPAR2
CROCYCLE
ZIGZAG
(optional) scan direction, described as:
USER (user native frame) or
xLON/xLAT as in CTYPEj (standard basis system),
including ALON/ALAT for Az or El scanning.
(optional) number of lines in a scan. Default 1.
(optional) number of repeats of each scan line. Default 1.
(optional, OTF/RASTER) For OTF, the line length or turn angle
(SCANGEOM=CIRCLE) in Deg; for RASTER, the number of samples in a line.
(optional, OTF) tracking rate along line (units depend on SCANMODE definition)
(optional, OTF) time for one line
(optional, RASTER) step along line between samples
(optional, OTF/RASTER) step between scan/raster lines
(optional, OTF/RASTER) offset in scan direction between lines
(optional) spare scan parameter (for modes I haven’t thought of)
(optional) another spare scan parameter
CAL/REF/ON loop string showing how often to go to CAL and REF.
eg. CROOCOO is a REF every four ONs and CAL every two ONs.
See 30m NCS documentation.
CAL/REF/ON are stored in OBSMODE per observation.
(optional, OTF/RASTER) TRUE if alternate lines traced in opposite directions,
FALSE if all lines traced in same direction
Most standard types of map can be coded in the SCAN header using these keywords. A few unusual
types require one or more parameters to change during the scan, between observations. In this case, the
parameters which change are taken out of the SCAN header and appear in the DATAPAR header.
Jenny Hatchell has examples of how to code standard scans (on-off, fivepoint, rectangular raster map
etc. ) using these parameters.
3.2
Phase description for switched observations.
Switched observations include wobbler switching, frequency switching, 2-horn beam switch, load switching,
and calibration observations. Which of these modes is active for each frontend is determined by SWTCHMOD
(FEBE), apart from wobbler switching which applies to all receivers and is flagged by WOBUSED (SCAN).
SWTCHMOD can take the values:
TOTP
FSW
BEAMSW
HORNSW
LOADSW
CAL
total power
frequency switch
beam switch (as 30m)
horn switch
switch between source and load
calibration cycle
Wobbler switching is controlled by 5 parameters in the SCAN header: WOBUSED, WOBTHROW,
WOBDIR, WOBCYCLE and WOBMODE.
WOBUSED
WOBTHROW
WOBDIR
WOBCYCLE
WOBMODE
True if wobbler in use
wobbler throw in deg.
wobbler throw direction - described as USER (user native frame)
or xLAT or xLON, inc. ALON or ALAT for Az or El scanning
wobbler period in seconds
wobbler mode (SQUARE/TRIANGULAR).
Triangular switching is wobbling in a direction perpendicular to the scan direction, during OTF mapping.
Create Date: April 10, 2003
Page 10
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
The wobbler movements can be deduced from plotting the positions of each integration (eg. LATOFF
and LONGOFF in DATAPAR).
Frequency switching: FRQTHROW (FEBE header) gives the frequency step for frequency switched
observations. LOFREQ (MONITOR) gives the LO frequencies from the frontend, one of which switches
when frequency switching.
Phases for switched observations are stored with each integration in ISWITCH (DATAPAR). Some
common examples are:
Type of switching
frequency switching
wobbler (nutating subreflector)
2 phases
4 phases (symm. switch)
2-horn beam switch
2 phases
4 phases (symm. switch)
load switching
2 phases
calibration
3 phases
ISWITCH
FHI/FLO
ON/OFF
LON/ROFF/LOFF/RON
L/R
LON/ROFF/LOFF/RON
SKY/LOAD
HOT/COLD/SKY
Users of more complex switch cycles (eg. combined wobbler and frequency switching) can invent their
own coding.
The phase weighting has to be calculated from the total integration times in each phase (INTEGTIM in
DATAPAR).
3.3
Calibration parameters
A rough calibration of both spectral line and continuum data is carried out at the telescope. The derived
calibration parameters are stored in the FEBE table (for parameters which don’t usually vary from scan
to scan, but are measured occasionally) and in the MONITOR table. Although this at-the-telescope
calibration is stored, a careful data reduction should go back to assess the quality of the original calibration
data, average and interpolate between calibrations as necessary. Calibration parameters in the FEBE table
which are not available at the time of writing should be left blank to be updated later.
3.3.1
Continuum calibration
To calibrate a continuum observation the following are needed: opacity per feed(elevation-dependent);
gain-elevation correction; counts-to-Jy calibration factor; feed offsets, HPBW of each feed, and beam
shapes; and flatfield. This information is stored in MBFITS as follows.
Ref: APEX-SRS-RUB-0002 (BOA Software Requirements).
– Opacity correction
The elevation-dependent opacity per feed per frequency band can be derived from the zenith opacity
at each frequency. This comes from skydips, taumeter or bolometer total power measurements.
In the case of bolometer total power and taumeter reports, the zenith opacity can be updated on
an integration-by-integration basis. TAUZEN in MONITOR stores the zenith opacity. Bracketing
taumeter readings from at least the beginning and end of each scan should be available so that the
optical depth can be interpolated to each integration. If TAUZEN is determined from skydips, the
value from the last skydip will have to be written at the telescope (but can be updated during further
data reduction).
Create Date: April 10, 2003
Page 11
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
– Gain-elevation correction
???? For homology telescopes (Effelsberg and the 30m) this can be simply parameterised but is
empirically measured? What is the parameterisation for APEX? Should we store these parameters
in MBFITS?
– Calibration factor (counts-to-Jy)
From comparison of observed/theoretical planet fluxes and secondary calibrators. At the telescope
a standard value will be taken but during later data reduction, the planet observations should
be taken into account. The standard value is stored in BOLCALFC (FEBE header) (previously
BOLREFGN). Measured values from scans on flux calibrators are stored in the MONITOR point
OBSFLUX CALFLUX CALFAC.
– Array geometry
Feed offsets and HPBW are determined occasionally from maps of strong sources and stored in
FEEDOFFX, FEEDOFFY and HPBW (FEBE table, per observation) per frequency band. More information
about the beam shapes is not stored.
The array feed position and other calibration parameters in the FEBE table change with wobbler
position. This is not taken into account at the moment. It may not be as simple as storing these
parameters twice for two wobbler positions, as the wobbler displacement may be more complex than
this (eg. 2-D, and data taken at intermediate positions). One possibility would be to parameterise
the change in the calibration parameters with wobbler position. Calibration information at this level
of detail is unlikely to be available for the raw data file and should be handled by the data reduction
software.
– Flatfield
Array flatfield/ relative gains (measured occasionally) are stored in BOLFLAT (FEBE, per scan).
3.3.2
Spectral line calibration
To calibrate a spectrum one requires: the Gain Array, the calibration temperature Tcal , and the beam
efficiency. These quantities are derived from cal colds (comparison of cold load, hot load and sky) plus
continual monitoring of ambient and chopper temperatures and occasionally measured telescope efficiencies. Alternatively, T sky and Tcal can be calculated more frequently via an atmospheric model which
reads the opacity from a water vapour radiometer.
ref: APEX-SRS-MPI-0000 (APEX spectral line software requirements)
– Gain array
The channel gains are determined by comparing hot load and sky during a cal cold. Cal colds are
observations which can occur within one scan interspersing astronomical data collection. The gain
array is stored per cal cold in the MONITOR table.
– Calibration, receiver and system temperatures
The calibration temperature TCAL for each frequency band is determined from cal colds or the atmospheric model, along with receiver (TRX), main band and image system (TSYS, TIMAG) temperatures. These temperatures are stored in TRX TSYS TIMAG TCAL ¡baseband¿ in the MONITOR
table at the time of the cal cold. The basic measurements (THOT, TCOLD, PHOT, PCOLD, PSKY are also
stored in MONITOR.
– Image/signal sideband gain ratio
GAINIMAG, which is also used in the calibration to derive TCAL, is measured occasionally by comparison
with atmospheric models and stored in the FEBE table every scan.
– Beam efficiency
The main beam, aperture and forward efficiencies are measured occasionally on calibrators and are
stored in the FEBE table for each feed and band.
Create Date: April 10, 2003
Page 12
Contact author: Jennifer Hatchell
�APEX
3.4
Multi-Beam FITS Raw Data Format
DATE-OBS
The following description of DATE-OBS as used in MBFITS is adapted from Bunclark & Rots 1996. For
more details on the DATE-OBS format see that reference.
The new format is a restricted subset of ISO-8601:
CCYY-MM-DDThh:mm:ss.ssss1
represents a calendar year, the ordinal number of a calendar month within
the calendar year, and the ordinal number of a day within the calendar month.
represents the hour in the day, the minutes, the seconds. The value of the
integer part of the seconds field is normally in the range [0..59] but may take the value 60, if the
time scale is UTC, to indicate a leap second. The literal ’T’ is the ISO 8601 time designator.
There must be a ’T’ time designator between the date and the time. The decimal point
character is an ASCII full-stop (hexadecimal value 0x2E).
1
APEX DATE-OBS requires the time field with a precision of 100µs or four decimal places in the ‘seconds’
field.
3.5
WCS coordinates
The representation of spatial coordinates has undergone a major revision in v. 1.0. The aims of this are to
take into account the latest version of the World Coordinate System (WCS), making clear the relationship
between parameters in current use at the 30m and those stored in this format; and to clarify the sources
of positional information written in the raw data. Spectral coordinates have also been updated to comply
with WCS (see Sect. 3.5.9).
3.5.1
Sources of spatial coordinate information
The spatial coordinate information stored in the raw data file has several origins:
– Observer’s setup the user’s setup of spatial coordinate frame, wobbler and scanning setups.
The observer’s setup is stored in the SCAN header (reference frames, source position, observing,
switch and scan modes) and the DATAPAR header (scan direction).
– Commanded coordinates User’s setup translated into commanded antenna and wobbler position
at a given time. For the antenna drive the commanded coordinates must be translated into (Az,El).
For later comparison with the real-time coordinates, the commanded coordinates including the wobbler offsets can also be calculated at this stage, in any appropriate frame (eg. RA/Dec, or the user’s
native frame). In v.1.0 we store the commanded longitude and latitude offsets in the user’s chosen
basis frame (defined by CTYPEj, eg. RA/Dec) in the DATAPAR table as (CBASLONG, CBASLAT)
– Raw drive commanded and readout coordinates
The commanded (Az,El) antenna position is translated into telescope drive commands via the pointing model: part of this is handled by the telescope control system and part by the antenna pointing
computer (see Sect. 3.5.8).
– Real coordinates
The readout from the antenna drive is then back-translated by the pointing model into the real
antenna Az/El at the time of observation. The telescope pointing can be affected by wind, tracking
errors etc. and thus the readout positions will differ from the commanded coordinates. This pointing
correction should be carried out at the telescope and once only (see Sect. 3.5.8).
The real coordinates at a given time — the pointing-corrected antenna position in Az/El, plus the
wobbler offsets – are stored in the MONITOR stream.
Create Date: April 10, 2003
Page 13
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
– Derived coordinates From the real antenna coordinates in Az/El plus the wobbler offsets, various
forms of the celestial coordinates associated with an integration can be derived. Example coordinate
systems are a standard basis frame such as RA/Dec, or offsets with respect to source position in
user native frame according to the current observing setup.
In v.1.0 we store derived Az/El (AZIMUTH, ELEVATIO), offsets in the user’s native frame (LONGOFF,
LATOFF), and longitude and latitude in the chosen basis frame(BASLONG, BASLAT) (which can be
directly compared with the commanded coordinates CBASLONG, CBASLAT) in the INTMON table.
3.5.2
WCS representation and telescope control system input
The World Coordinate System (WCS) (Greisen & Calabretta, Calabretta & Greisen, Greisen &
Valdes 2002) is considered by the FITS committee as a soon-to-be standard. It is a general, flexible
and powerful system for the representation of image coordinates, both spatial and spectral, notably including support for nonlinear coordinates (such as spatial projections and nonlinear spectrometers). The
ALMATI-FITS format, and our MBFITS format, based their representation of coordinates on this format
(following the ALMATI-FITS data-reduction-oriented storage scheme). However, WCS is an evolving format and has been updated since the ALMATI FITS format was designed (latest update considered here
Apr 2002).
At some stage in the data reduction process, there will almost certainly be the requirement to write
images out as FITS. The current plans for NIFTI and for APEX envisage carrying out all the data
reduction within FITS formats, starting with MBFITS, until finally FITS images are written. It makes
sense to ensure at the raw data stage that all the necessary coordinate information is stored in suitable
format to allow easy construction of WCS-format image headers.
This does not mean storing a complete FITS-format image at the raw data stage. A data reduction
program will be required to turn the raw data into a useful image (averaging integrations, subtracting
off positions etc.). The same reduction software can compile the headers for the image, provided all the
necessary information is made available. At the raw data stage, the only useful images that could be
produced are uncalibrated maps of observed positions eg. for array o-t-f maps (note FITS images do not
have to be gridded on rectangular pixels).
Even a full description of the image axes does not comprise all the positional information: a small
amount of additional description of how the observations were actually carried out is necessary for the
calibration/data reduction process (as well as for the construction of the image headers).
The 30m currently stores extra positional information by storing the inputs to the telescope control
system, OBSINP (see OBSINP manual), as well as the fundamental real-time positions in the DAPs
(Data Associated Parameters). The OBSINP inputs reflect all the current flexibility of the telescope
control systems. The system is tailored to single-dish observing and encompasses the observing modes
that are likely to be in use at APEX. However, APEX will have a different telescope control system with
different input keywords, and may have different observing modes. There are plans to upgrade the 30m
control system to the New Control System (NCS), which will be more flexible than the current system.
MBFITS should be general enough to support all the modes available at the 30m (current and future) and
APEX. MBFITS keywords need to be general enough to cover what is needed from the OBSINP input,
the NCS, and the APEX TICS commands.
The coordinate storage scheme used in MBFITS up until now has consisted of limited WCS-style
keywords with added 30m-type parameters. But there has been duplication of information without it
being clear which parameters are redundant, and the format has neither fully conformed with WCS-FITS
nor provided for the full range of observing modes of the 30m system. Thus we undertake a revision
in v.1.0, continuing with a scheme that is based on FITS WCS, but incorporates additional coordinate
information where this is necessary for the data reduction or clarifies the observing procedure.
MBFITS is (as it stands) a raw data and not an image format. The information needed to construct
an image becomes available at different times during the observing from different sources (eg. TCS and
telescope position monitors) and thus appears in various tables. We have left this information scattered
about, but coded in a form such that it could be easily collected together to produce an image table. A
Create Date: April 10, 2003
Page 14
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
y
Array position
ρ
p2
LATOFF
(x,y)=((LONGOFF,LATOFF))
Origin of
user native frame
p1
Object
LONGOFF
α
(φ,θ)=(LONGOBJ,LATOBJ))
(x,y)=((φcosθ
θ, θ)
δ
Projection of user native frame
(φ,θ)=(0,0), (x,y)=(0,0)
(α,δ)=(CRVAL1,CRVAL2)
(p1,p2)=(CRPIX1,CRPIX2)
si
ba
l
ca
mi
o
n
tro
As
x
e
ram
f
s
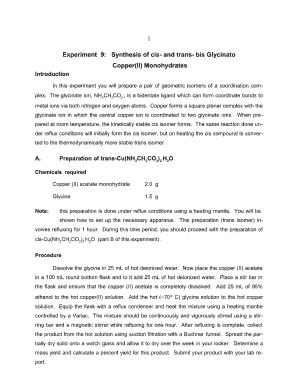
Figure 2: Coordinate relationships for single dish array observations in WCS scheme.
next step is to write a definition for a separate image table, as a necessary step in the data reduction, but
this is postponed until a later version.
Clearly, it must be possible to derive the WCS image descriptions from the OBSINP parameters, or
from the APEX control system, plus the real-time position information. Where the same information can
be stored in more than one way, the WCS format is always given; additional parameters are given where
the WCS parameters are derived in such a complex way from the observing setup that a reverse translation
is non-trivial, and where information is added that is not stored in the WCS header.
The derivations of WCS quantities from the 30m parameters are given below in Sect. 3.5.5, but first
in Sect. 3.5.3 we give a brief description of the relevant aspects of WCS and in Sect. 3.5.4 list the 30m
OBSINP parameters which currently control positioning at that telescope.
3.5.3
WCS coordinate systems
In this section we describe the coordinate systems in WCS and their meanings for single-dish observing.
For the details of representing spatial coordinates using WCS see Calabretta & Greisen 2002. Fig. 2
illustrates the coordinate systems – more explanation of the figure is given at the end of Sect. 3.5.5.
The WCS specifies how to describe the celestial ‘world’ coordinate system – the coordinates in a
Create Date: April 10, 2003
Page 15
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
standard astronomical basis frame – of an image given in pixel coordinates. It makes this translation
using two intermediate coordinate systems: intermediate world coordinates, where angles are given in
a spherical frame which is offset and rotated with respect to the basis frame, and intermediate pixel
coordinates, the flat-plane projection of the intermediate world coordinates, which may be rotated with
respect to the pixel axes.
The translation between the (planar) intermediate pixel coordinates (x, y) and the (spherical) intermediate world coordinates (φ, θ) is a non-linear one which depends on the projection. Calabretta &
Greisen 2002 give many projections: the usual one for single-dish radio astronomy is Sanson-Flamsteed
(SFL). This is similar to the former FITS global sinusoidal ‘projection’ (GLS) (though this was necessarily
a linear coordinate translation), and gives a translation between intermediate pixel coordinates (x, y) and
intermediate world coordinates (φ, θ) of
x = φ cos θ
y = θ.
(1)
In terms of our needs, the intermediate world coordinates (φ, θ) correspond to longitude and latitude
offsets in the user’s native coordinate frame - an arbitrary rotated frame appropriate to the observations.
The pixel (p1, p2) to intermediate pixel (x, y) coordinate offset/rotation then allows for translation of pixel
offsets into the user’s native system, in our case for array rotation and wobbler offsets.
3.5.4
30m parameters
The main OBSINP parameters which currently control positioning at the 30m are given in Table 1. For
details see the OBSINP manual.
Keyword
SBAS
Table 1: OBSINP positioning parameters
Description
Basis system: if followed by D, D * or P then use
SL0P, SB0P and SK0P additionally to define a user native frame
Equinox (where necessary)
SEQN
In SBAS D:
SL0P
origin of user frame in basis system
SB0P
origin of user frame in basis system
SK0P
angle which user frame zero meridian makes with basis system meridian
In SBAS D * or SBAS P:
SL0P
pole of user frame in basis system
SB0P
pole of user frame in basis system
SK0P
angle which user system zero meridian makes with basis meridan through pole
SLAM
Source longitude in basis system
SBET
Source latitude in basis system
OLAM or OLAM* Long. offset from source in user frame
OBET
Lat. offset from source in user frame
In addition, the 30m DAPs store the RA and Dec for each integration, and the longitude and latitude
offsets LAM(t) and BET(t) if scanning.
The on-the-fly scanning parameters also control position, but only affect the WCS description through
the resulting LONGOFF and LATOFF. The scan parameters are covered by SCANxxxx in the SCAN header:
see Sect. 3.1.
3.5.5
WCS parameters (including derivation from 30m parameters)
The following list gives the keywords required in the WCS description. We also give the derivation from
the 30m OBSINP+DAP, and what is now stored in MBFITS v.1.0.
Create Date: April 10, 2003
Page 16
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
CTYPEj Define basis frame and projection: format is 4-3 with 4 characters for the basis and 3 for the
projection, padded with dashes. The first four characters give one of the basis systems available in
the FITS standard: RA/DEC, GLON/GLAT, ELON/ELAT, HLON/HLAT, or SLON/SLAT. (G
for galactic, E for ecliptic, H for helioecliptic, S for supergalactic: see Calabretta & Greisen 2002).
The usual projection for single dish radio astronomy is Sanson-Flamsteed, coded SFL, for which
x = φ cos θ
y=θ
(2)
where φ and θ are longitude and latitude in the user’s native spherical system, and (x,y) are latitude/longitude offsets. Other projections can be specified if required.
We need two basis representations which are non-standard, to handle Az/El and moving body coordinates. WCS FITS allows for the possibility of coding your own basis system as xLON/xLAT,
with definition of the system given in the additional keyword WCSNAME. We propose to use
ALON/ALAT with WCSNAME ’Horizontal coordinates’ for Azimuth/Elevation.
See Sect. 3.5.6 for a description of how MBFITS works in the case of moving bodies.
CTYPEj are stored in the SCAN header.
WCSNAME
A description of the basis coordinate system, especially where it is non-standard. See CTYPEj (above).
Stored in SCAN header.
RADESYS Additional ecliptic/equatorial basis system definition eg.
Greisen (2002) Table 1.
FK4/FK5: see Calabretta
Stored in SCAN header.
EQUINOX Basis system equinox.
Stored in SCAN header.
A combination of CTYPE, WCSNAME, RADESYS and EQUINOX cover all the astronomical basis systems in
the OBSINP scheme.
PVj m Additional projection parameters – not needed for SFL, so we leave these out of MBFITS.
pi Pixel coordinates if not a regular grid.
Stored in the FEBE table, in the array offsets FEEDOFFX, FEEDOFFY
PCi j Rotation/skew matrix to translate pixel coordinates to intermediate pixel coordinates (projection
of user frame).
For an integration where the array y axis makes an angle ρ with the native (user) frame θ axis, PC
is the rotation matrix
�
�
cos ρ − sin ρ
PC =
.
sin ρ cos ρ
For single feed observations, PC is the identity matrix. The angle ρ is derived from the dewar angle,
optical arrangement and elevation.
PCi j are stored in INTMON, derived from the dewar angle DEWANG (MONITOR table).
CRPIXi Pixel coordinates of the native frame origin. Note these are not the pixel coordinates of the
source, which may not be at (0,0), and that they are measured in the pixel coordinate frame, which
we take to be centred at the array centre and oriented along the array axes.
Given the source position in the native frame (LONGOBJ, LATOBJ), plus lat./long. offsets to the
array centre (which may include wobbler offsets), then the CRPIX are:
Create Date: April 10, 2003
Page 17
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
�
CRPIX1
CRPIX2
�
�
= −P C −1
LONGOBJ cos(LATOBJ) + LONGOFF
SBET + LATOFF
�
where P C is the matrix to rotate the array pixel coordinates into the user native frame, given above,
with
PC
−1
=
�
cos ρ
− sin ρ
sin ρ
cos ρ
�
.
The CRPIXi condense the source position and offsets in the user frame into one pair of coordinates.
We therefore keep the source position in the user frame as LONGOBJ and LATOBJ (SCAN header), and
the offsets from this position in LATOFF and LONGOFF (INTMON table).
The CRPIXi are stored in INTMON.
CDELTj
Scale pixel coords to intermediate pixel coords.
FITS requires all angles to be given in degrees. As long as FEEDOFFX and FEEDOFFY comply with
this, the CDELT take their default values of 1 and can be left out.
CRVALj
Origin of native frame in basis coordinates
Stored in SCAN header.
In the SBAS D scheme, these are SL0P and SB0P.
LONPOLE
Longitude of native pole in basis coordinates
Stored in SCAN header.
In the SBAS D scheme,
sin(LONPOLE) =
− sin(SK0P) cos(SB0P)
.
sin[arccos(cos(SB0P) cos(SK0P))]
LATPOLE
Latitude of basis pole in native coordinates (note the opposite definition to LONPOLE
Stored in SCAN header.
In the SBAS D scheme,
sin(LATPOLE) = cos(SB0P) cos(SK0P).
CRVAL, LONPOLE and LATPOLE can also be calculated in terms of SL0P, SK0P and SB0P for the
alternative SBAS P or D * scheme (not yet done). We propose to store the frame definition in the WCS
format. Storing CRVALj, LONPOLE and LATPOLE is equivalent to storing SL0P, SK0P and SB0P, and the
translation is straightforward.
The keywords required for each step in the coordinate transformation are:
Pixel coordinates (p1 , p2 ) to projection plane coordinates (x, y)
– (FEEDOFFX, FEEDOFFY): pixel coordinates
– CRPIXi: pixel coordinates of projection plane origin
– PCi j: rotation matrix
Projection plane (x, y) to user native spherical coordinates (φ, θ)
– CTYPEj: xxxx-SFL projection
Create Date: April 10, 2003
Page 18
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
User native spherical (φ, θ) to celestial basis (α, δ)
–
–
–
–
–
–
CRVALj : native system origin in basis coordinates
LONPOLE: longitude of native pole in basis coordinates
LATPOLE: latitude of basis pole in native coordinates
CTYPEj: xLON/xLAT-xxx basis system
RADESYS: equatorial/ecliptic system additional description
EQUINOX
Fig. 2 illustrates the general situation which we have just described using WCS keywords. We show the
array centred at offsets (LATOFF, LONGOFF) from a source position (LONGOBJ, LATOBJ) in the user’s rotated
frame. The user’s native frame is in turn centred at (CRVAL1, CRVAL2) in the standard astronomical basis
frame defined by CTYPEj.
If observations are made with a single feed, then the P C matrix reduces to the identity matrix and the
pixel offsets are all zero. In this case, it would be simpler to define the pixel offsets as (LONGOFF, LATOFF)
and measure the pixel offset of the user frame origin CRPIX from the source position in the user native
frame. This scheme could well be useful later in the data reduction process, but here in the raw data format
we give the more general description for rotated array observations so that all observing possibilities are
covered.
3.5.6
Moving bodies
Moving bodies are a special case for coordinate storage, because the local reference frame is defined by
the ephemeris and rotates with time. To support moving body observations, we have a flag MOVEFRAM in
the SCAN header. The orbital elements are then also listed in the SCAN header.
As the native coordinate frame rotates with time, the parameters which define it with respect to the
fixed basis frame need to be stored with each integration. These are given as MCRVAL1, MCRVAL2, MLONPOLE
and MLATPOLE in the DATAPAR table, per integration. The equivalents in the SCAN header can be
ignored for moving bodies.
We then need two WCS descriptions of the image (multiple image axes descriptions are allowed in
FITS). Firstly, as in order to carry out the observations we have already defined the body frame in terms
of a fixed basis system (eg. RA/Dec), we have the description to provide output in that fixed frame, using
the CTYPE values in the SCAN header. This is only useful on an integration-by-integration basis, as the
body moves across the sky.
More usefully, we propose a second coordinate description with CTYPE=BLON/BLAT (longitude and
latitude in the frame of the body) with WCSNAME ’Moving body coordinates’. As this frame exactly tracks
the body’s native coordinate system, CRVALj= (0, 0), LONPOLE= 0 and LATPOLE= 90. At present this
second axis description is not written explicitly into MBFITS as it does not change and is only useful at
the point where an image table is written.
Whether the more complex observing modes such as on-the-fly can be used on a moving body will
depend on the cleverness of the telescope control system. The MBFITS format allows for a full description
in the case of a moving frame as for a fixed frame.
3.5.7
Observations in Az/El, On-the-fly mapping in Az/El
Another special case for coordinate representation are observations where the user native frame is Az/El
but the required basis frame is a fixed celestial one. The Az/El frame shifts and rotates with time with
respect to the celestial frame. Again, the moving frame flag MOVEFRAM is set and the horizontal frame
centre is defined by MCRVAL1, MCRVAL2, MLONPOLE and MLATPOLE in the DATAPAR table, per integration,
and the equivalents in the SCAN header can be ignored. If output is only required in Az/El frame, then
the native frame is the basis frame and the frame centre stays fixed.
For on-the-fly mapping in azimuth (or elevation) about a source/offset position defined in a celestial
system, the basis frame and native frame are celestial frames related by the usual parameters (neither is
Az/El), and (LATOFF, LONGOFF) is given in the native celestial frame for each integration as usual,
Create Date: April 10, 2003
Page 19
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
although the scanning was specified in azimuth. The derivation of as (LATOFF, LONGOFF) from the
real-time antenna coordinates and wobbler offset plus frame definitions must then take into account the
chopping direction, stored in WOBDIR.
3.5.8
Pointing
The corrections to the pointing can be divided into antenna, subreflector and receiver-dependent static
terms, dynamic pointing and focus corrections from observations of pointing sources during the observations, focus/elevation interplay, and the refraction correction.
The pointing corrections are dealt with in two stages: the telescope control system (TICS) handles
the refraction correction, the dynamic antenna pointing correction, and the receiver terms; and the antenna pointing computer deals internally with the static pointing, the dynamic focus correction, (and the
focus/elevation interplay ?).
The static pointing coefficients for the APEX antenna follow the 7-coefficient model described by
Mangum (2001), which follows the Stumpff (1972) model, plus an extra flexure term which behaves in the
same way as receiver offsets at the Nasmyth focus.
The pointing terms are given in Table 2.
Table 2: Pointing terms
Term
30m equiv. Description
Antenna static terms, in SCAN header
IA
P1
Azimuth zero offset
CA
P2
Collimation
NPAE
P3
Collimation of the axes /Non-perpendicularity
between mount azimuth and elevation axes
AN
P5
Azimuth azis offset north-south / zenith shift
AW
-P4
Azimuth offset east-west / zenith shift
IE
P7
Elevation zero offset
ECEC
P8
Gravitational flexure perpendicular to optical axis
plus vertical receiver offset at Nasmyth focus
ZFLX
Gravitational flexure parallel to optical axis
plus horizontal receiver offset at Nasmyth focus
Receiver static terms, in FEBE table
IARX
Receiver azimuth zero offset
CARX
Receiver collimation
IERX
Receiver elevation zero offset
ECEC
Receiver flexure term
Focus/elevation correction: internal to pointing computer?
Observed pointing corrections, in MONITOR
IAOBS
NULA
azimuth offset determined from pointing obs.
CAOBS
COL*
collimation determined from pointing obs.
IEOBS
NULE
Elevation offset determined from pointing obs.
Dynamic focus correction, in MONITOR
FOCUSOBS
SFC2
Radial focus correction determined from focus measurement.
Refraction correction, in MONITOR
REFRACTIO
Refraction correction, from HUMIDITY,
TAMBIENT, and PRESSURE as a function of elevation
At APEX it is yet to be decided if the raw telescope drive readouts and the focus/elevation correction
(?) will be available from the pointing computer and therefore if the full pointing calculation can be
repeated offline. We also don’t store the full set of coefficients for reconstructing the refraction correction.
Create Date: April 10, 2003
Page 20
Contact author: Jennifer Hatchell
�APEX
Multi-Beam FITS Raw Data Format
However, we do store the static antenna and receiver terms and the dynamic antenna and focus corrections,
plus the total refraction correction, for reference.
3.5.9
WCS spectral coordinates
The v.0.3 scheme for spectral coordinates followed the ALMA-TI FITS format which basically complied
with WCS, but as WCS has been updated since ALMA-TI FITS was written we have made some changes
in v. 1.0 to keep in line with the latest version (Greisen & Valdes 2002). These axes descriptions are in
the ARRAYDATA header. (The velocity description is only given for spectral line receivers.)
There are alternative frequency and velocity descriptions of the data axis, both in the chosen rest
frame. These are described by WCSNAME ‘xxxxFreq’ and ‘xxxxVRad’ where xxxx represents the rest
frame (eg. LSRK). The frequency description is labelled ‘F’ and the radio velocity description ‘R’.
In the WCS system, VELOSYS (VSYS) stores the observer’s velocity with respect to the rest frame,
which we previously stored in V FRAME. This velocity difference changes with time – here it is stored
every observation, but if needed it could be stored closer to the integration level (in MONITOR?). The
old keywords VELO SYS and V FRAME have been removed from the scan header. VELO SYS – a 4-letter
description of the velocity frame – clashed with the WCS name.
SPECSYS (SPEC) describes the velocity standard of rest frame. SSYSOBS (SOBS) is added to take the
constant spectral coordinate of each image (pixel) plane - here the observer’s frame ‘TOPOCENT’. VSOURCE
(VSOU) gives the source velocity with respect to the standard of rest, and VELOSYS (VSYS) gives the
observer’s velocity with respect to the standard of rest.
The keywords V EARTH, V HEL and V SYS subdividing VELOSYS into components are not included. These
values can be stored in the WCS system by adding extra velocity frame descriptions in addition to the
‘LSRK’ one. It would also be simple to provide alternative frequency/velocity axis descriptions for the
image sideband or for velocities in the source frame, if required.
Actual frequency settings for the receivers/LO chain are stored in the MONITOR stream.
4
References
References
[1] Lucas, R., and Glendenning, B., 2001, ‘ALMA Test Interferometer Raw Data Format’, ALMA-SW0015.
[2] Brunswig W., Thum C., Salter C., Ruiz M., Schraml J.,
http://www.iram.es/IRAMES/otherDocuments/manuals/
‘OBSINP manual (30m)’,
[3] Greisen E. W., Calabretta M.R. 2002, ‘Representation of world coordinates in FITS’, in prep., available
from http://www.aoc.nrao.edu/∼egreisen/
[4] Calabretta M.R., Greisen E. W., 2002, ‘Representation of celestial coordinates in FITS’, in prep.,
available from http://www.aoc.nrao.edu/∼egreisen/
[5] Greisen E. W., Valdes F. G., 2002, ‘Representations of spectral coordinates in FITS’, in prep., available
from http://www.aoc.nrao.edu/∼egreisen/
[6] Wells, D.C., Greisen E.W., Harten R.H., 1981, A&AS, 44, 363
[7] Mangum J. G., 2001, ’A Telescope Pointing Algorithm for ALMA’, ALMA Memo 366
[8] Bunclark P., Rots A., 1996, ‘Precise re-definition of the DATE-OBS Keyword encompassing the millenium’, http://www.cv.nrao.edu/fits/wcs/year2000.txt
[9] Cotton W.D., Tody D., Pence W.D., 1995, ‘Binary table extension to FITS’, A&AS 113, 159
Create Date: April 10, 2003
Page 21
Contact author: Jennifer Hatchell
�APEX
Create Date: April 10, 2003
5
MBFITS specification
5.0.10
Data types
The following coding is used in the tables for data types:
L 1-byte logical
A 1-byte ASCII character
I
2-byte integer (±32767)
J 4-byte integer
E 4-byte real
D 8-byte double
P 16-byte pointer
5.1
The Primary header
Page 22
Keyword
NAXIS
SIMPLE
BITPIX
EXTEND
TELESCOP
ORIGIN
CREATOR
MBFTSVER
COMMENT
Type
1I
1L
1I
1L
20A
20A
20A
10A
20A
Value
0
T
32
T
Description
Telescope Name
Organisation or Institution
Software (including version)
MBFITS version
Multi-Beam FITS Raw Data Format
Contact author: Jennifer Hatchell
�The SCAN-MBFITS Binary Table
Stored every scan, containing parameters which do not change between observations, including:
APEX
Create Date: April 10, 2003
5.2
– Telescope and observatory parameters
– Time system
– Coordinate system
– Velocity system
– Project ID
– Source and coordinates
– Observing mode
– Pointing coefficients
5.2.1
SCAN-MBFITS Binary Table Header Keywords
Page 23
Type
20A
20A
1D
1D
1E
12A
12A
1J
23A
1D
1D
Units
deg
deg
m
day
s
N OBS
TIMESYS
UT1UTC
TAIUTC
CTYPE1
CTYPE2
RADESYS
1J
4A
1D
1D
8A
8A
8A
s
s
-
EQUINOX
1E
Julian yrs
FITS Description
’SCAN-MBFITS’
Telescope Name
observatory longitude
observatory latitude
observatory elevation
Project ID
Observer and operator initials
Scan number
scan start in TIMESYS system
Scan date/time (Modified Julian Date)
Local apparent sidereal time (scan
start)
Number of observations in this scan
time system (TT, TAI, UTC ...)
UT1-UTC time translation
TAI-UTC time translation
Basis system (longitude) – XLON-SFL
Basis system (latitude) – xLAT-SFL
additional system definition for ecliptic/equatorial coords
Equinox
Comment
was 4 characters, now 12 - less restrictive
See Sect. 3.5 for coordinate system definition
Multi-Beam FITS Raw Data Format
Contact author: Jennifer Hatchell
Keyword
EXTNAME
TELESCOP
SITELONG
SITELAT
SITEELEV
PROJID
OBSID
SCANNUM
DATE-OBS
MJD
LST
�Page 24
deg
Native frame zero in basis system
(long.)
Native frame zero in basis system (lat.)
Native longitude of celestial pole
Basis latitude of native pole
Source name
Source longitude in native frame
Source latitude in native frame
Calibrator Code
True if tracking a moving frame
CRVAL2
LONPOLE
LATPOLE
OBJECT
LONGOBJ
LATOBJ
CALCODE
MOVEFRAM
1D
1D
1D
20A
1D
1D
4A
1L
deg
deg
deg
deg
deg
-
PERIDATE
PERIDIST
LONGASC
1D
1D
1D
Julian yrs
AU
deg
OMEGA
INCLINAT
ECCENTR
ORBEPOCH
ORBEQNOX
DISTANCE
SCANTYPE
1D
1D
1D
1D
1D
1D
20A
deg
deg
yrs
Julian yrs
AU
-
TP, Julian date of perihelion passage
QR, perihelion distance
OM, Longitude of ascending node (in
degrees)
W, Angle from asc. node to perihelion
IN, Inclination
EC, Eccentricity
EPOCH, Epoch of orbital elements
Elements equinox
Geocentric Distance
Scan astronomical type
SCANMODE
20A
-
Mapping mode
SCANGEOM
20A
-
Scan geometry
SCANDIR
4A
-
(optional) scan direction
In the case of moving objects, the orbital elements are also
stored. The abbreviations in the description match JPL
Horizons.
including POINT, FOCUS, CAL, SKYDIP, HOLO,
OTF, ONOFF, PSW, RASTER, CROSS, UNKNOWN,
FLUXCAL. . . Formerly OBSTYPE. Any of the following
SCANxxxx parameters can change from observation to observation move to the DATAPAR header and should be
looked for there. Particularly SCANDIR often changes between observations. The parameters should be included as
needed depending on SCANMODE. See text.
SAMPLE, RASTER, OTF. v.1.2: SCANMODE now holds
map type and SCANGEOM the geometry
including SINGLE, LINE, CROSS, RECT, QUAD, CIRC,
CURVE
described as USER (user native frame) or xLON/xLAT as
in CTYPEj (standard basis system), including ALON/ALAT
for Az or El scanning.
Multi-Beam FITS Raw Data Format
Contact author: Jennifer Hatchell
1D
APEX
Create Date: April 10, 2003
CRVAL1
�Page 25
-
(optional) number of lines in a scan.
Default 1.
(optional) number of repeats of each
scan line. Default 1.
user-defined (optional, OTF/RASTER) line length
SCANRPTS
1J
SCANLEN
1D
SCANXVEL
1D
SCANTIME
SCANXSPC
1D
1D
SCANYSPC
1D
SCANSKEW
1D
SCANPAR1
SCANPAR2
1D
1D
CROCYCLE
20A
user-defined (optional, OTF) tracking rate along
line.
user-defined (optional, OTF) time for one line
user-defined (optional, RASTER) step along line between samples
user-defined (optional, OTF/RASTER) step between scan/raster lines
user-defined (optional, OTF/RASTER) offset in
scan direction between lines
user-defined (optional) spare scan parameter
user-defined (optional) another spare scan parameter
CAL/REF/ON loop string
ZIGZAG
1L
-
TRANDIST
1J
m
TRANFREQ
1J
m
TRANFOCU
1J
m
WOBUSED
WOBTHROW
WOBDIR
1L
1D
4A
deg
-
(optional, OTF/RASTER) Scan in
zigzag?
(optional, HOLO) Holography transmitter distance
(optional, HOLO) Holography transmitter frequency
(optional, HOLO) transmitter offset
from prime focus
Wobbler used?
wobbler throw
wobbler throw direction
WOBCYCLE
WOBMODE
NFEBE
IA
1E
20A
1J
1E
s
deg
wobbler period
wobbler mode (SQUARE/TRIANGULAR)
NFEBE number of FEBEs
Pointing Coefficient (P1)
For
OTF,
the
line
length
or
turn
angle
(SCANGEOM=CIRCLE) in Deg; for RASTER, the number
of samples in a line.
Units depend on SCANMODE definition.
for modes I haven’t thought of. . .
SWTCHMOD has moved to the FEBE header, as it is
receiver-dependent
showing how often to go to CAL and REF, eg. CROOCOO
is a REF every four ONs and CAL every two ONs – see 30m
NCS documentation.
TRUE if alternate lines traced in opposite directions,
FALSE if all lines traced in same direction.
If SCANTYPE=HOLO, these three special holography keywords
are stored.
Wobbler parameters apply to all receivers.
Described as USER (user native frame) or xLAT or xLON, inc.
ALON or ALAT for Az or El scanning.
Previously N FEBE
For a full description of the pointing terms see Sect. 3.5.8.
Multi-Beam FITS Raw Data Format
Contact author: Jennifer Hatchell
1J
APEX
Create Date: April 10, 2003
SCANLINE
�5.2.2
deg
deg
deg
deg
deg
deg
deg
Pointing
Pointing
Pointing
Pointing
Pointing
Pointing
Pointing
Coefficient
Coefficient
Coefficient
Coefficient
Coefficient
Coefficient
Coefficient
APEX
Create Date: April 10, 2003
1E
1E
1E
1E
1E
1E
1E
CA
NPAE
AN
AW
IE
ECEC
ZFLX
(P2)
(P3)
(P5)
(-P4)
(P7)
(P8)
(Flexure)
SCAN-MBFITS Binary Table Columns
The scan table just contains a list of FEBEs.
Keyword
FEBE
Type
17A
Units
-
Description
Frontend-backend combination identification
Comments
format: – where FE and BE are 8-letter identifiers
Page 26
Multi-Beam FITS Raw Data Format
Contact author: Jennifer Hatchell
�Page 27
5.3.1
The FEBEPAR-MBFITS Binary Table
The FEBEPAR table is stored per FEBE per scan and contains the frontend-backend setup. Parameters common to all FEBEs are in the SCAN
table. Includes:
APEX
Create Date: April 10, 2003
5.3
– FEBE setup: number of pixels, polarisations and basebands
– Pointing coefficients specific to this FE
– Calibration parameters specific to this FEBE
A note on feed/pixel counting:
An array has a certain number of pixels/elements/feeds, each of which has associated polarisation, offset and other properties. For any one
scan, only a subset of these may be in use. In order that the arrays storing the fixed properties (polarisation etc.) remain the same for each use
of the array, but to minimise data storage when only a subset is in use, we differentiate between the number of feeds on the array (FEBEFEED =
total number of array elements) and the number of feeds in use (USEAC, USEDC = AC/DC coupled array elements in use for bolometers, USEFEED
for heterodyne receivers).
A receiver outputting two polarised feeds is equivalent to an ’array’ with two ’pixels’: the polarisations are then stored in POLTY and the
feeds (here polarisations) in use in USEFEED.
FEBEPAR-MBFITS Binary Table Header Keywords
Type
20A
Units
-
Description
’FEBEPAR-MBFITS’
Comment
FEBE
17A
-
format: – where FE and BE are 8-letter identifiers
SCANNUM
DATE-OBS
1J
23A
-
DEWRTMOD
5A
-
Frontend-backend combination identification.
Scan number
observing date (Y2K format with time)
in
TIMESYS system (scan start)
Dewar tracking system
DEWANG
1J
Deg
Dewar angle
FEBEBAND
FEBEFEED
1J
1J
-
NBD number of basebands for this febe
NFD total number of feeds
CABIN = fixed in Nasmyth/Cassegrain system, EQUA:
RA/DEC; HORIZ: AZ/EL
Fixed in DEWRTMOD system, measured counterclockwise
from vertical. Fixed throughout a scan.
Frequency bands
FEBEFEED stores the total number of feeds for the receiver in use. A receiver outputting two polarisations
counts as two feeds. For an array, count the total no. of
pixels, even if not all in use.
Multi-Beam FITS Raw Data Format
Contact author: Jennifer Hatchell
Keyword
EXTNAME
�Page 28
1J
-
NUSFD Number of feeds in use.
SWTCHMOD
20A
-
Switch mode
NO SWITCH
FRQTHROW
IARX
1J
1E
1E
Hz
deg
CARX
1E
deg
IERX
1E
deg
ECECRX
1E
deg
ZFLXRX
1E
deg
no. of switch phases in a switch cycle
Frequency switching throw
Pointing Coefficient (receiver), adds to
IA (P1)
Pointing Coefficient (receiver), adds to
CA (P2)
Pointing Coefficient (receiver), adds to
IE (P7)
Pointing Coefficient (receiver), adds to
ECEC (P8)
Pointing Coefficient (receiver), adds to
ZFLX
5.3.2
So that we can minimally dimension the data storage array in ARRAYDATA table. Now for bolometers or heterodyne. A bolometer feed which is AC- and DC-coupled
counts twice here
TOTP, FSW, BEAMSW, HORNSW, LOADSW, CAL. . .
Moved from SCAN header, as receiver-dependent - apart
from WOBSW, which is covered by WOBUSED in SCAN
header
fs/wobbler
APEX
Create Date: April 10, 2003
NUSEFEED
Here are the receiver-specific pointing coefficients:
FEBEPAR-MBFITS Binary Table Columns
Multidimensional parameters that can’t go in the FEBEPAR header. These include parameters for the whole array and for the subset which is
in use.
Type
NUSFD J
Units
-
Description
List of feeds which are in use
FEEDTYPE
NUSFD A
-
feed type
FEEDOFFX
NFD D
deg
feed x offset
Comments
The data in the ARRAYDATA table are stored in the order
listed in USEFEED (heterodyne receivers).
v.1.2: USEAC, USEDC and corresponding data arrays are
removed so that table structure remains constant.
’H’ for heterodyne; for bolometers, ’A’=AC-coupled,
’D’=DC-coupled.
The following parameters depend on feed and (sometimes)
frequency band, and are given for the whole array, not just
the feeds in use.
x offset of each feed from rotation centre in DEWRTMOD
system.
Multi-Beam FITS Raw Data Format
Contact author: Jennifer Hatchell
Keyword
USEFEED
�Page 29
NFD D
deg
feed y offset
REFFEED
1J
-
feed number of reference feed
POLTY
POLA
NFD A
NFD E
deg
Feed type (X, Y, L, R)
Feed orientation
APEREFF
BEAMEFF
ETAFSS
HPBW
ANTGAIN
BOLCALFC
NFD ×NBD
NFD ×NBD
NFD ×NBD
NFD ×NBD
NFD ×NBD
NBD E
BOLFLAT
GAINIMAG
NFD ×NBD E
NFD ×NBD E
E
E
E
E
E
Aperture efficiency
Beam efficiency
Forward efficiency
deg
Half-power beam width
K/Jy
Antenna Gain
Jy/countsBolometer calibration factor
-
y offset of each feed from rotation centre in DEWRTMO